Non-Euclidean geometry
A non-Euclidean geometry is the study of shapes and constructions that do not map directly to any n-dimensional Euclidean system, characterized by a non-vanishing Riemann curvature tensor. Examples of non-Euclidean geometries include the hyperbolic and elliptic geometry, which are contrasted with a Euclidean geometry. The essential difference between Euclidean and non-Euclidean geometry is the nature of parallel lines. Euclid's fifth postulate, the parallel postulate, is equivalent to Playfair's postulate, which states that, within a two-dimensional plane, for any given line ℓ and a point A, which is not on ℓ, there is exactly one line through A that does not intersect ℓ. In hyperbolic geometry, by contrast, there are infinitely many lines through A not intersecting ℓ, while in elliptic geometry, any line through A intersects ℓ (see the entries on hyperbolic geometry, elliptic geometry, and absolute geometry for more information).
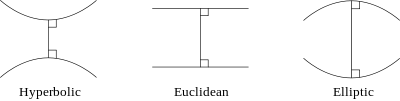
Another way to describe the differences between these geometries is to consider two straight lines indefinitely extended in a two-dimensional plane that are both perpendicular to a third line:
- In Euclidean geometry the lines remain at a constant distance from each other even if extended to infinity, and are known as parallels.
- In hyperbolic geometry they "curve away" from each other, increasing in distance as one moves further from the points of intersection with the common perpendicular; these lines are often called ultraparallels.
- In elliptic geometry the lines "curve toward" each other and eventually intersect.
For the layman, non-euclidean geometry can be understood by picturing the drawing of geometric figures on curved surfaces. For example, the surface of a sphere or the inside surface of a bowl.
Contents |
Concepts of non-Euclidean geometry
Non-Euclidean geometry systems differ from Euclidean geometry in that they modify Euclid's fifth postulate, which is also known as the parallel postulate.
In general, there are two forms of (homogeneous) non-Euclidean geometry, hyperbolic geometry and elliptic geometry. In hyperbolic geometry there are many distinct lines through a particular point that will not intersect with another given line. In elliptic geometry there are no lines that will not intersect, as all that start separate will converge. In addition, elliptic geometry modifies Euclid's first postulate so that two points determine at least one line. Riemannian geometry deals with geometries which are not homogeneous, which means that in some sense not all the points are the same. For example, consider the surface formed by gluing one end of a cylinder to a half sphere. Then points on the sphere locally obey elliptic geometry, but points on the cylinder locally obey Euclidean geometry. Bernhard Riemann, building on the work of Gauss, determined a method of describing such spaces.
Basing new systems on these assumptions, each is constructed with its own rules and postulates. Non-Euclidean geometries and in particular elliptic geometry play an important role in relativity theory and the geometry of spacetime.
The concepts applied to certain non-Euclidean planes can only be shown in three or even four dimensions. The Möbius strip and Klein bottle are both complete one-sided objects, impossible in a Euclidean plane. The Möbius strip can be shown in three dimensions, but the Klein bottle requires four.
Non-Euclidean geometry of spacetime
The scope of non-Euclidean geometry includes the spacetime theory of Herman Minkowski. This geometry substitutes a bilinear form for the usual metric distance. Concepts in this geometry refer to a hyperbolic angle rather than the usual Euclidean angle; for example the squeeze mapping moves these angles as does Euclidean rotation move ordinary angles. Instead of perpendicular lines, the spacetime geometry uses hyperbolic-orthogonal lines which determine hyperplanes of simultaneity. Foundations of a planar version of spacetime were explored, using synthetic geometry, in 1912 by Gilbert N. Lewis and Edwin B. Wilson in the Proceedings of the American Academy of Arts and Sciences 48:387–507. See the references for an excerpt, "Synthetic Spacetime", including definitions, 16 axioms, 21 theorems, and various corollaries by Lewis and Wilson.
Furthermore, hyperbolic geometry arises in special relativity as follows: an inertial frame of reference is determined by a velocity, and given a unit of time, each velocity corresponds to a future event from the origin that is the position of an observer with that velocity after the temporal unit. These future events form a hyperboloid, the basis of the hyperboloid model of hyperbolic geometry. Herman Minkowski made this connection on his famous paper of 1908.[1]
History
While Euclidean geometry, named after the Greek mathematician Euclid, includes some of the oldest known mathematics, non-Euclidean geometries were not widely accepted as legitimate until the 19th century.
The debate that eventually led to the discovery of non-Euclidean geometries began almost as soon as Euclid's work Elements was written. In the Elements, Euclid began with a limited number of assumptions (23 definitions, five common notions, and five postulates) and sought to prove all the other results (propositions) in the work. The most notorious of the postulates is often referred to as "Euclid's Fifth Postulate," or simply the "parallel postulate", which in Euclid's original formulation is:
If a straight line falls on two straight lines in such a manner that the interior angles on the same side are together less than two right angles, then the straight lines, if produced indefinitely, meet on that side on which are the angles less than the two right angles.
Other mathematicians have devised simpler forms of this property (see parallel postulate for equivalent statements). Regardless of the form of the postulate, however, it consistently appears to be more complicated than Euclid's other postulates (which include, for example, "Between any two points a straight line may be drawn").
For at least a thousand years, geometers were troubled by the disparate complexity of the fifth postulate, and believed it could be proved as a theorem from the other four. Many attempted to find a proof by contradiction, including the Arabic mathematician Ibn al-Haytham (Alhazen, 11th century),[2] the Persian mathematicians Omar Khayyám (12th century) and Nasīr al-Dīn al-Tūsī (13th century), and the Italian mathematician Giovanni Girolamo Saccheri (18th century).
The theorems of Ibn al-Haytham, Khayyam and al-Tusi on quadrilaterals, including the Lambert quadrilateral and Saccheri quadrilateral, were "the first few theorems of the hyperbolic and the elliptic geometries." These theorems along with their alternative postulates, such as Playfair's axiom, played an important role in the later development of non-Euclidean geometry. These early attempts at challenging the fifth postulate had a considerable influence on its development among later European geometers, including Witelo, Levi ben Gerson, Alfonso, John Wallis and Saccheri.[3] All of these early attempts made at trying to formulate non-Euclidean geometry however provided flawed proofs of the parallel postulate, containing assumptions that were essentially equivalent to the parallel postulate. These early attempts did, however, provide some early properties of the hyperbolic and elliptic geometries.
Khayyam, however, may be somewhat of an exception. Unlike many commentators on Euclid before and after him (including Saccheri), Khayyam was not trying to prove the parallel postulate as such but to derive it from an equivalent postulate he formulated from "the principles of the Philosopher" (Aristotle): "Two convergent straight lines intersect and it is impossible for two convergent straight lines to diverge in the direction in which they converge."[4] Khayyam then considered the three cases right, obtuse, and acute that the summit angles of a Saccheri quadrilateral can take and after proving a number of theorems about them, he correctly refuted the obtuse and acute cases based on his postulate and hence derived the classic postulate of Euclid. Another exception may be al-Tusi's son, Sadr al-Din (sometimes known as "Pseudo-Tusi"), who wrote a book on the subject in 1298, based on al-Tusi's later thoughts, which presented one of the earliest arguments for a non-Euclidean hypothesis equivalent to the parallel postulate. "He essentially revised both the Euclidean system of axioms and postulates and the proofs of many propositions from the Elements."[5][6] His work was published in Rome in 1594 and was studied by European geometers, including Saccheri.[5]
Giordano Vitale, in his book Euclide restituo (1680, 1686), used the Saccheri quadrilateral to prove that if three points are equidistant on the base AB and the summit CD, then AB and CD are everywhere equidistant.
In a work titled Euclides ab Omni Naevo Vindicatus (Euclid Freed from All Flaws), published in 1733, Saccheri quickly discarded elliptic geometry as a possibility (some others of Euclid's axioms must be modified for elliptic geometry to work) and set to work proving a great number of results in hyperbolic geometry. He finally reached a point where he believed that his results demonstrated the impossibility of hyperbolic geometry. His claim seems to have been based on Euclidean presuppositions, because no logical contradiction was present. In this attempt to prove Euclidean geometry he instead unintentionally discovered a new viable geometry. At this time it was widely believed that the universe worked according to the principles of Euclidean geometry.
The beginning of the 19th century would finally witness decisive steps in the creation of non-Euclidean geometry. Around 1830, the Hungarian mathematician János Bolyai and the Russian mathematician Nikolai Ivanovich Lobachevsky separately published treatises on hyperbolic geometry. Consequently, hyperbolic geometry is called Bolyai-Lobachevskian geometry, as both mathematicians, independent of each other, are the basic authors of non-Euclidean geometry. Gauss mentioned to Bolyai's father, when shown the younger Bolyai's work, that he had developed such a geometry about 20 years before, though he did not publish. While Lobachevsky created a non-Euclidean geometry by negating the parallel postulate, Bolyai worked out a geometry where both the Euclidean and the hyperbolic geometry are possible depending on a parameter k. Bolyai ends his work by mentioning that it is not possible to decide through mathematical reasoning alone if the geometry of the physical universe is Euclidean or non-Euclidean; this is a task for the physical sciences. Between 1820 and 1823 Bolyai prepared a treatise on a complete system of non-Euclidean geometry.
In the 1840s, Hermann Grassmann wrote a Ph.D. thesis on abstract algebra and exterior algebra, wherein he argued that the dimensionality of the physical Universe was not necessarily three, but may be unbounded. In 1846 he derived a coordinate and metric-free geometric calculus, suitable for a class of spaces including affine and projective spaces. Unfortunately although Grassmann's work was fundamental to several 20th century branches of mathematics, it was so far ahead of its time that his peers couldn't understand it.[7]
Bernhard Riemann, in a famous lecture in 1854, founded the field of Riemannian geometry, discussing in particular the ideas now called manifolds, Riemannian metric, and curvature. He constructed an infinite family of non-Euclidean geometries by giving a formula for a family of Riemannian metrics on the unit ball in Euclidean space. Sometimes he is unjustly credited with only discovering elliptic geometry; but in fact, this construction shows that his work was far-reaching, with his theorems holding for all geometries.
.jpg)
Models of non-Euclidean geometry
Euclidean geometry is modelled by our notion of a "flat plane."
Elliptic geometry
The simplest model for elliptic geometry is a sphere, where lines are "great circles" (such as the equator or the meridians on a globe), and points opposite each other are identified (considered to be the same).
In the elliptic model, for any given line ℓ and a point A, which is not on ℓ, all lines through A will intersect ℓ.
Elliptic geometry is not simply a coordinate system whereby Euclidean 3-dimensional space is measured. Rather, elliptic geometry posits that our Euclidean "flat" planes simply do not exist - what we perceive to be flat planes are themselves spheres.
Hyperbolic geometry
Even after the work of Lobachevsky, Gauss, and Bolyai, the question remained: does such a model exist for hyperbolic geometry? The model for hyperbolic geometry was answered by Eugenio Beltrami, in 1868, who first showed that a surface called the pseudosphere has the appropriate curvature to model a portion of hyperbolic space, and in a second paper in the same year, defined the Klein model, the Poincaré disk model, and the Poincaré half-plane model which model the entirety of hyperbolic space, and used this to show that Euclidean geometry and hyperbolic geometry were equiconsistent, so that hyperbolic geometry was logically consistent if and only if Euclidean geometry was. (The reverse implication follows from the horosphere model of Euclidean geometry.)
In the hyperbolic model, within a two-dimensional plane, for any given line ℓ and a point A, which is not on ℓ, there are infinitely many lines through A that do not intersect ℓ.
Other models
There are other mathematical models of the plane in which the parallel postulate fails, for example the Dehn plane consisting of all points (x,y), where x and y are finite surreal numbers.
Importance
The development of non-Euclidean geometries proved important to physics in the 20th century. Albert Einstein's general theory of relativity describes space as generally flat (i.e., Euclidean), but as elliptically curved (i.e., non-Euclidean) near regions where energy is present. This kind of geometry, where the curvature changes from point to point, is called Riemannian geometry.
Fiction
Non-Euclidean geometry often makes appearances in works of science fiction and fantasy. Its usage is most clearly tied with the influence of the 20th century horror fiction writer H. P. Lovecraft. In his works, many unnatural things follow their own unique laws of geometry. This is said to be a profoundly unsettling sight, often to the point of driving those who look upon it insane. The main character in Robert Pirsig's Zen and the Art of Motorcycle Maintenance mentioned Riemannian Geometry on multiple occasions.
In The Brothers Karamazov, Dostoevsky discusses non-Euclidean geometry through his main character Ivan.
See also
|
|
Notes
- ↑ Scott Walter (1999) Non-Euclidean Style of Special Relativity
- ↑ Eder, Michelle (2000), Views of Euclid's Parallel Postulate in Ancient Greece and in Medieval Islam, Rutgers University, http://www.math.rutgers.edu/~cherlin/History/Papers2000/eder.html, retrieved 2008-01-23
- ↑ Boris A. Rosenfeld & Adolf P. Youschkevitch, "Geometry", p. 470, in Roshdi Rashed & Régis Morelon (1996), Encyclopedia of the History of Arabic Science, Vol. 2, pp. 447–494, Routledge, London and New York:
"Three scientists, Ibn al-Haytham, Khayyam and al-Tusi, had made the most considerable contribution to this branch of geometry whose importance came to be completely recognized only in the nineteenth century. In essence their propositions concerning the properties of quadrangles which they considered assuming that some of the angles of these figures were acute of obtuse, embodied the first few theorems of the hyperbolic and the elliptic geometries. Their other proposals showed that various geometric statements were equivalent to the Euclidean postulate V. It is extremely important that these scholars established the mutual connection between tthis postulate and the sum of the angles of a triangle and a quadrangle. By their works on the theory of parallel lines Arab mathematicians directly influenced the relevant investiagtions of their European couterparts. The first European attempt to prove the postulate on parallel lines – made by Witelo, the Polish scientists of the thirteenth century, while revising Ibn al-Haytham's Book of Optics (Kitab al-Manazir) – was undoubtedly prompted by Arabic sources. The proofs put forward in the fourteenth century by the Jewish scholar Levi ben Gerson, who lived in southern France, and by the above-mentioned Alfonso from Spain directly border on Ibn al-Haytham's demonstration. Above, we have demonstrated that Pseudo-Tusi's Exposition of Euclid had stimulated borth J. Wallis's and G. Saccheri's studies of the theory of parallel lines."
- ↑ Boris A. Rosenfeld & Adolf P. Youschkevitch (1996), "Geometry", p. 467, in Roshdi Rashed & Régis Morelon (1996), Encyclopedia of the History of Arabic Science, Vol. 2, pp. 447–494, Routledge, ISBN 0-415-12411-5
- ↑ 5.0 5.1 Victor J. Katz (1998), History of Mathematics: An Introduction, p. 270–271, Addison–Wesley, ISBN 0-321-01618-1:
"But in a manuscript probably written by his son Sadr al-Din in 1298, based on Nasir al-Din's later thoughts on the subject, there is a new argument based on another hypothesis, also equivalent to Euclid's, [...] The importance of this latter work is that it was published in Rome in 1594 and was studied by European geometers. In particular, it became the starting point for the work of Saccheri and ultimately for the discovery of non-Euclidean geometry."
- ↑ Boris A. Rosenfeld and Adolf P. Youschkevitch (1996), "Geometry", in Roshdi Rashed, ed., Encyclopedia of the History of Arabic Science, Vol. 2, p. 447–494 [469], Routledge, London and New York:
"In Pseudo-Tusi's Exposition of Euclid, [...] another statement is used instead of a postulate. It was independent of the Euclidean postulate V and easy to prove. [...] He essentially revised both the Euclidean system of axioms and postulates and the proofs of many propositions from the Elements."
- ↑ [1]
References
- Anderson, James W. Hyperbolic Geometry, second edition, Springer, 2005
- Beltrami, Eugenio Teoria fondamentale degli spazî di curvatura costante, Annali. di Mat., ser II 2 (1868), 232–255
- Greenberg, Marvin Jay Euclidean and Non-Euclidean Geometries: Development and History, 4th ed., New York: W. H. Freeman, 2007. ISBN 0-7167-9948-0
- Milnor, John W. (1982) Hyperbolic geometry: The first 150 years, Bull. Amer. Math. Soc. (N.S.) Volume 6, Number 1, pp. 9–24.
- Stewart, Ian Flatterland. New York: Perseus Publishing, 2001. ISBN 0-7382-0675-X (softcover)
- Jeremy Gray (1989) Ideas of Space: Euclidean, Non-Euclidean, and Relativistic, 2nd edition, Clarendon Press.
External links
- Roberto Bonola (1912) Non-Euclidean Geometry, Open Court, Chicago.
- MacTutor Archive article on non-Euclidean geometry
- Non-euclidean geometry on PlanetMath
- Synthetic Spacetime, a digest of the axioms used, and theorems proved, by Wilson and Lewis. Archived by WebCite.